Visual-Inertial Odometry:
After extensively researching various Visual Inertial Navigation Systems (VINS) like
Visn-Fusion,
Kimera, ORBSLAM3,
Pyslam, among
others, I carefully evaluated their
capabilities and ultimately selected ORBSLAM3 for its impressive combination of
robustness and accuracy.
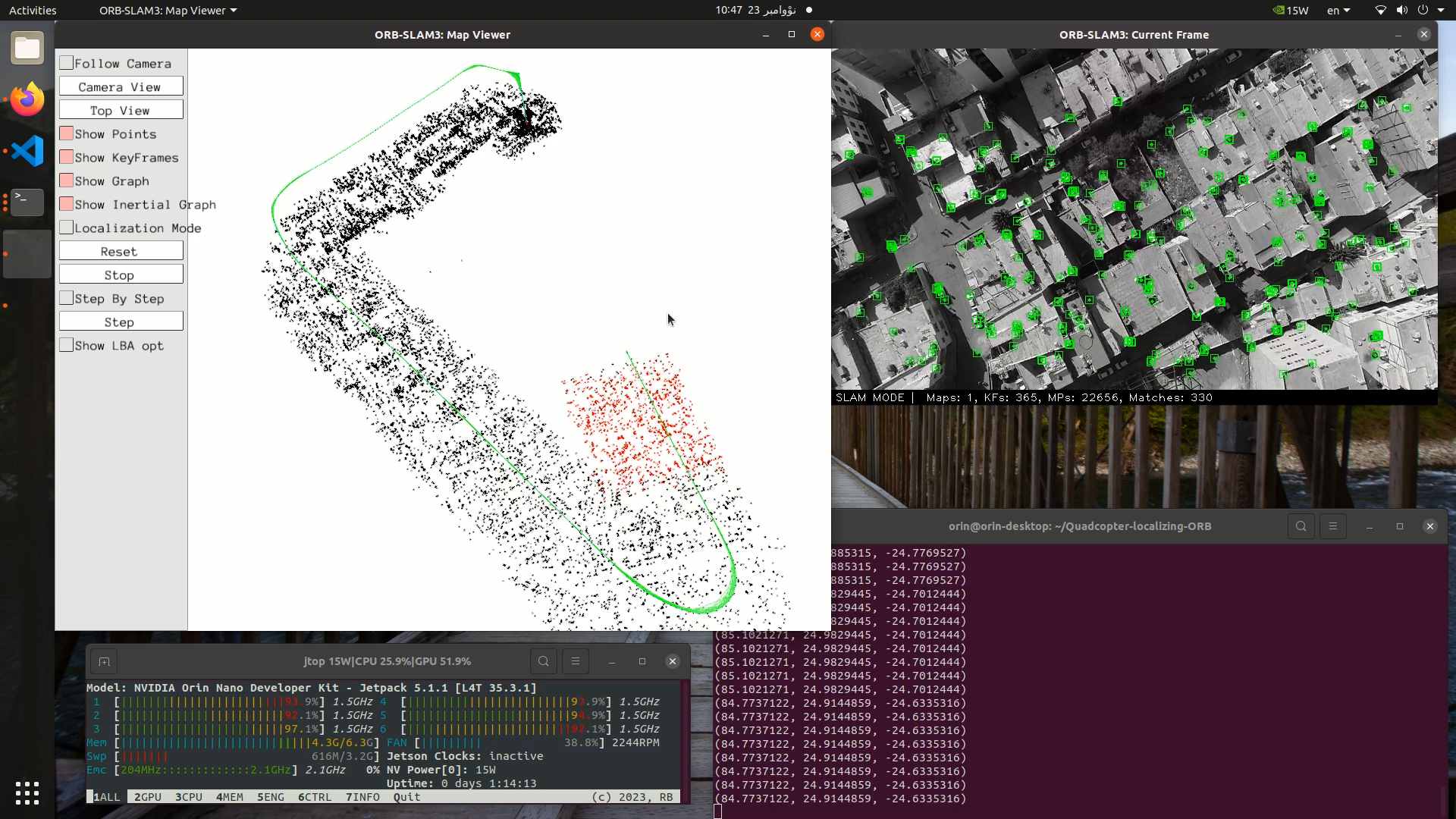
To implement ORBSLAM3, I successfully deployed it on both Jetson
Nano and
Jetson
Orin platforms. This involved adapting the system to run efficiently on
these
hardware configurations, ensuring optimal performance.
For rigorous testing and evaluation, I utilized diverse datasets representing both
aerial and ground scenarios. These datasets included
FGI Masala
Stereo-Visual-Inertial Dataset 2021,
EuRoC dataset, data collected using a
Our Phantom 4
Pro, and a custom dataset generated with our in-house data collection
system.
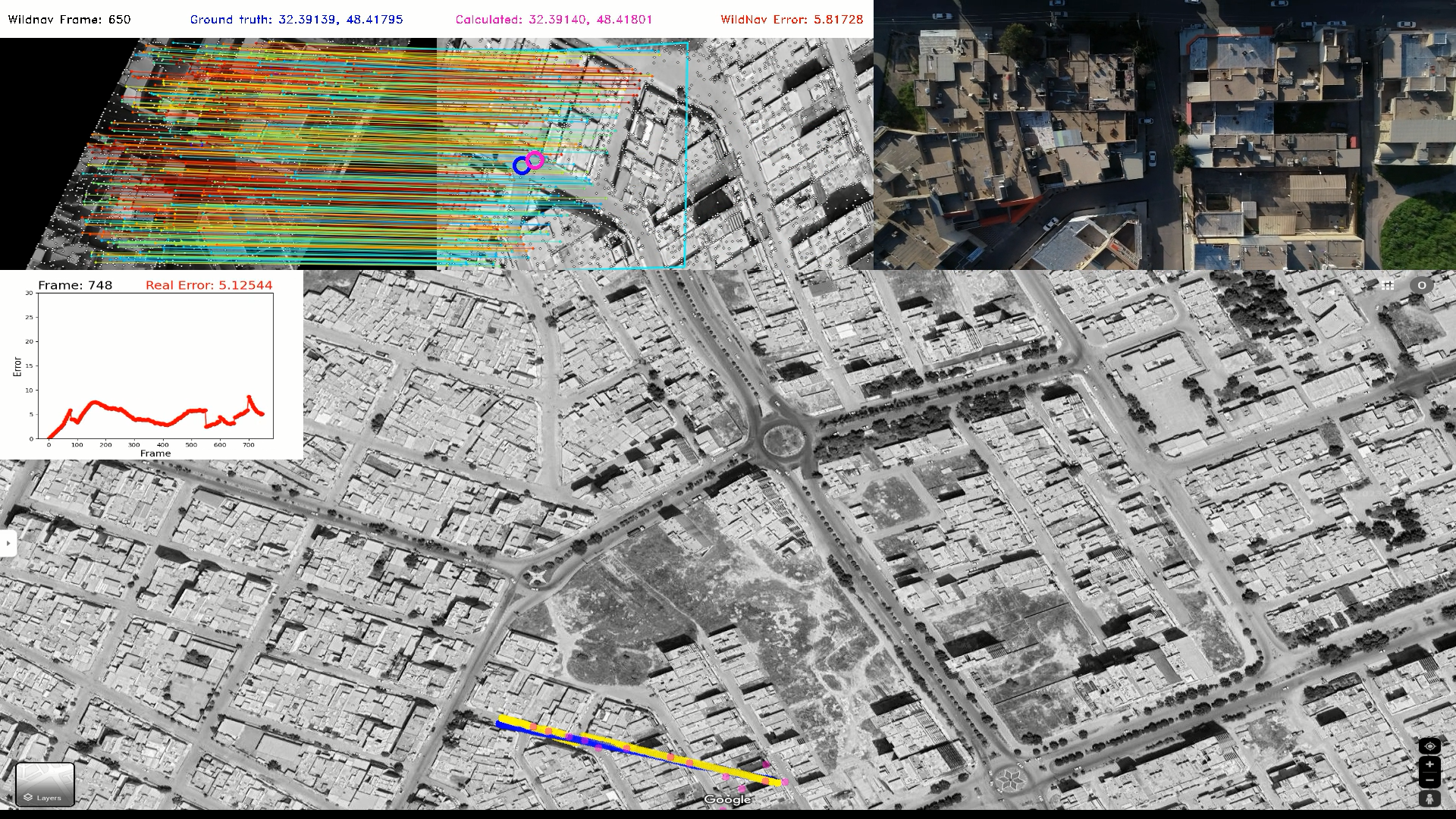
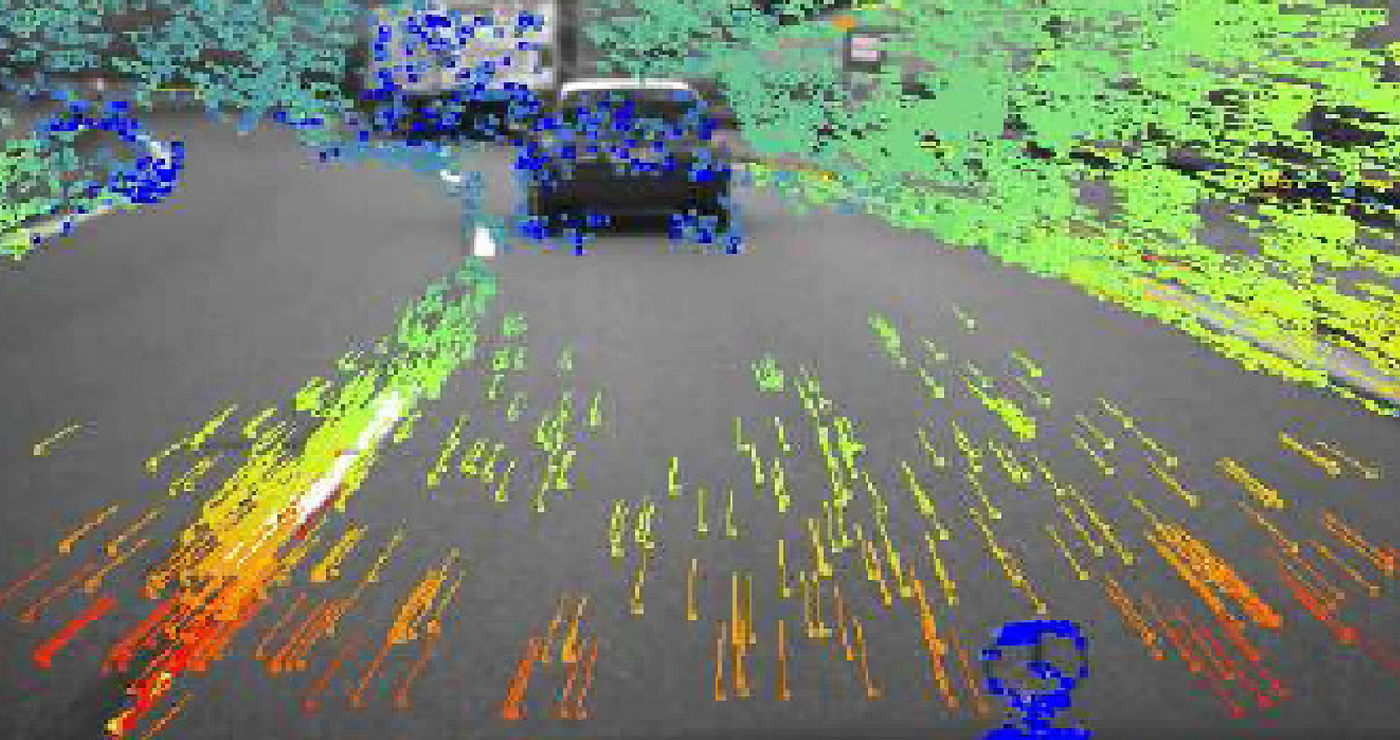
To showcase the effectiveness of my implementation, I've prepared a demonstration
that provides a clear example of the successful application of ORBSLAM3 in various
real-world scenarios. This demonstration serves as a testament to the system's
performance and its adaptability across different datasets and platforms.
IEEE Transactions on Robotics 2021
ORB-SLAM3:
Paper |
Code
Demo: